











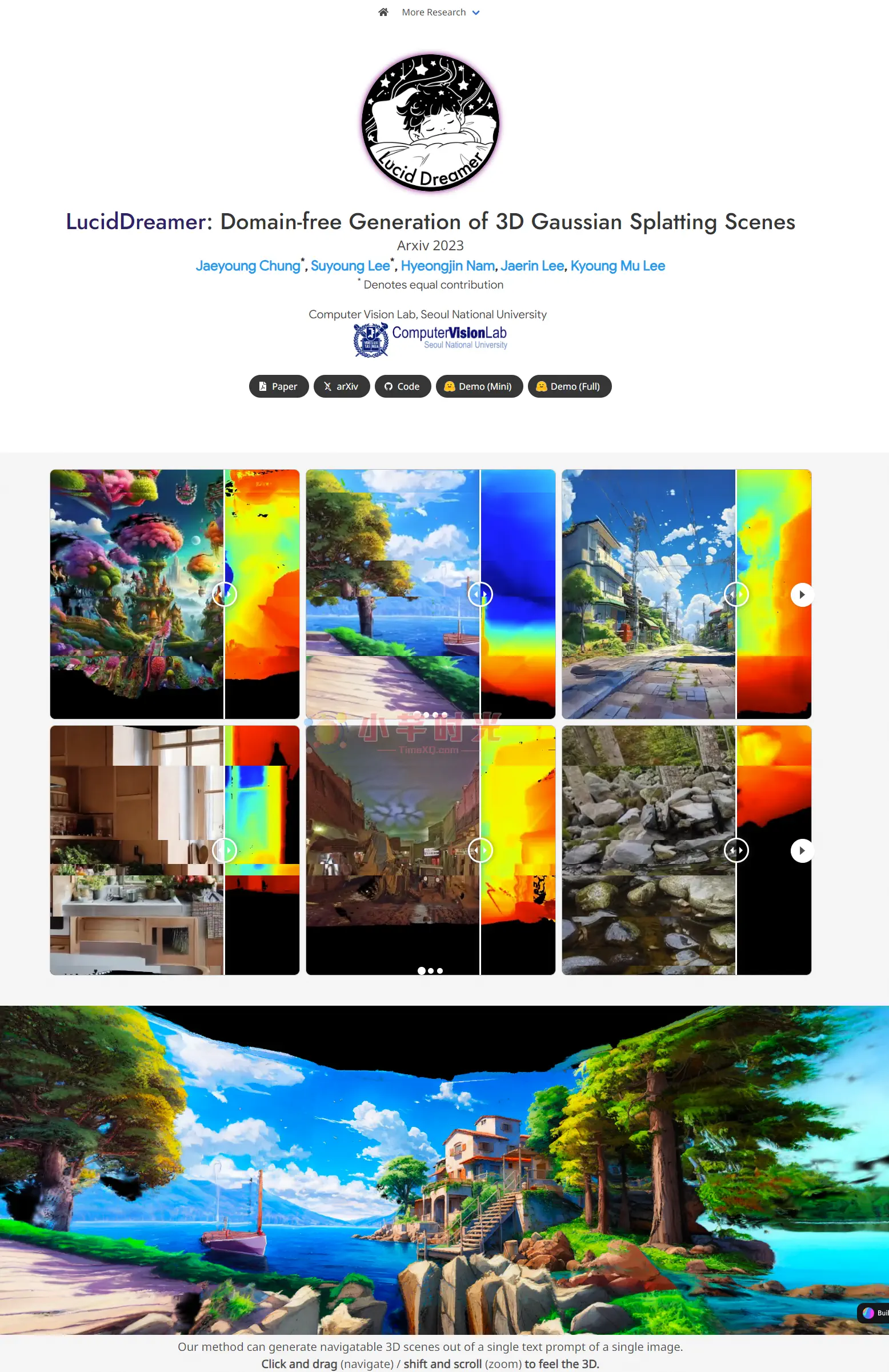
LucidDreamer简介
LucidDreamer 是一款革命性的软件工具,专门设计来生成根据文本提示从单个图像创建的可导航3D场景。这款工具支持通过点击、拖动操作进行场景导航,以及通过移动和滚动来缩放视图,为用户提供沉浸式的3D体验。随着虚拟现实(VR)设备和内容的盛行,对能够快速生成3D场景的技术要求日渐增强。但现有的3D生成模型往往受限于特定领域,通常是因为它们依赖于与实际世界差异较大的3D扫描数据集。LucidDreamer旨在突破这些限制,实现了一个领域无关的场景生成流程,最大化利用了当前大规模扩散式生成模型的强大能力。
LucidDreamer项目地址:
– https://luciddreamer-cvlab.github.io/
工作流程:
LucidDreamer的核心工作流程涉及两个关键步骤:生成(”做梦”)和对齐。
生成步骤
在这步中,为了确保生成的图像在多视角之间保持一致性,软件会先建立一个点云作为几何参照物。然后会将点云的一部分投影到所需视图,以此作为用生成模型进行图像修复的参考依据。接着,利用估计的深度图,将绘制的图像提升到3D空间中,形成新的数据点。
对齐步骤
这步是把新生成的数据点有效融入到3D场景之中。我们提出了一个对齐算法,用于和谐地整合新生成的3D场景的各个部分。完成后得到的3D场景是从初始高斯飞溅优化得到,它不受目标场景域的限制,并且细节精细。
例如
LucidDreamer能够根据一系列文本提示生成场景,提供更精细的控制能力。
技术细节和评价
我们还对比了LucidDreamer生成的场景与基于CLIP的Stable Diffusion生成的图像。运用了诸如CLIP-Score和CLIP-IQA这样的定量度量标准进行了比较。在CLIP-IQA的定量比较中,我们参照了质量、色彩鲜艳度和清晰度标准。结果显示,LucidDreamer在所有指标上都有出色表现。
此外,对于初始的SfM(Structure from Motion)点生成的高斯飞溅进行了度量比较。我们通过COLMAP对重建的结果进行评估,并发现与我们的点云相比,始终显示出更精确的重建指标。
LucidDreamer适用于设计师、创意专业人员和虚拟现实开发人员,他们需要高质量、领域无关的3D场景内容,以适应不断变化的多样化需求。这款工具以其创新性和在场景生成方面的前瞻性特性而著称。
数据评估
本站小芊时光提供的LucidDreamer-文本提示生成3D场景都来源于网络,不保证外部链接的准确性和完整性,同时,对于该外部链接的指向,不由小芊时光实际控制,在2024年4月16日 下午3:41收录时,该网页上的内容,都属于合规合法,后期网页的内容如出现违规,可以直接联系网站管理员进行删除,小芊时光不承担任何责任。





